Expressive Robotics
At the ExCITe center, we like to focus on expressive robotics: robots that can respond to the environment in a way that we expect a person might. Some of the research that has been done to allow this includes Audio Fingerprinting for song recognition and Visual Fingerprinting for gesture recognition. In both cases the robot HUBO is able to recognize that a song or dance is happening around it and then respond appropriately with a dance of its own.
Audio Fingerprinting
In our day to day lives we listen to music, and often will dance along. One of the goals with HUBO is to have the robot behave in a more human-like fashion, and that includes being able to dance to music. HUBO can listen to some music and use state of the art audio recognition software to recognize a song that is playing. Once the song is identified, the robot can then dance along to the music using pre-programmed dances that it already knows.
Visual Fingerprinting
Visual Fingerprinting is similar to Audio Fingerprinting in the sense that we are still having HUBO respond to the environment with an appropriate dance. Instead of listening for music, the robot watches a person and perceives dance moves. Once HUBO recognizes a dance that a person is doing, the robot dances along.
Fabric Sensors
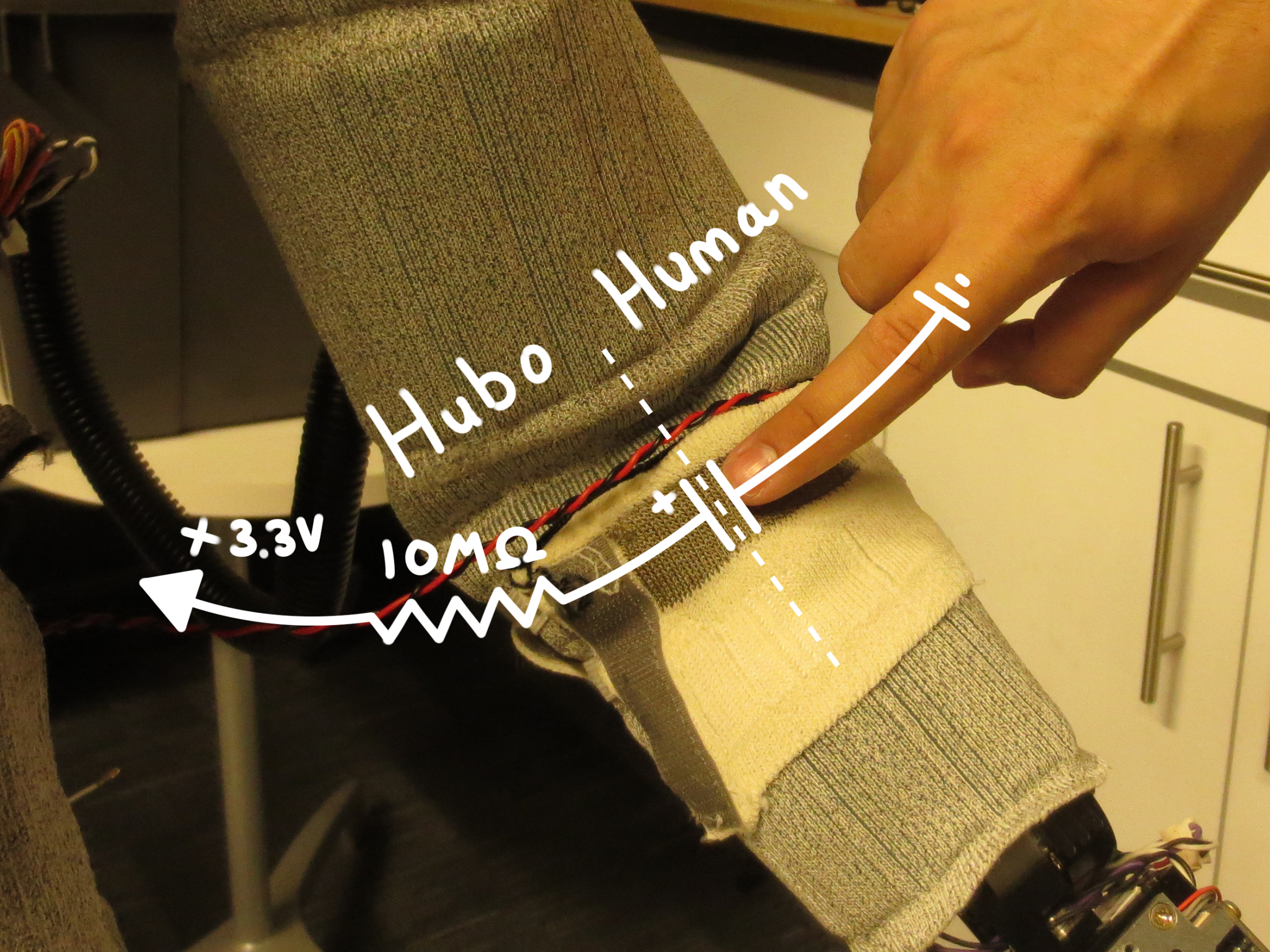
The Hubo Fabric Skin is a project initiated by the Shima Seiki Haute Technology Lab. The goal of the project is to replace the original rigid PVC shell covers with a flexible, cut resistant knitted covering to resist abrasions, provide soft cushioning for fragile components, and facilitate better wire routing around joints. Later versions of the fabric skin feature integrated, knitted tactile sensors that detect and respond to human touch. These sensors detect touch through capacitive coupling between the conductive yarn and the user’s body. The charge time of the circuit is measured and used to determine the RC (resistor-capacitor) time constant. The sensor can then determine whether or not a touch has occurred. Later sensors will include the ability to measure touch location along a continuous swatch of material and ultimately pressure sensitivity will be integrated into the skin to measure the magnitude and location of contact forces.