 The problem with having a microscopic robot propelled by a horde of tail-flailing bacteria is you never know where it’s going to end up. The tiny, bio-robots, which amount to a chip coated with a “carpet” of flagellated bacteria, emerged from the primordial ooze of microrobotics research a few years ago as a concept for building microscopic devices and delivering medication at the cellular level. But as with any robot, the challenge for making them useful is bridging the gap from movement to automation. A team of engineers at Drexel University might have done just that, according to research recently published in IEEE Transactions on Robotics about using electric fields to direct the robots in a fluid environment.
The problem with having a microscopic robot propelled by a horde of tail-flailing bacteria is you never know where it’s going to end up. The tiny, bio-robots, which amount to a chip coated with a “carpet” of flagellated bacteria, emerged from the primordial ooze of microrobotics research a few years ago as a concept for building microscopic devices and delivering medication at the cellular level. But as with any robot, the challenge for making them useful is bridging the gap from movement to automation. A team of engineers at Drexel University might have done just that, according to research recently published in IEEE Transactions on Robotics about using electric fields to direct the robots in a fluid environment.
In a follow-up to a 2014 report that presented a way to use the flagellated bacteria Serratia marcescens and an electric field to make a microrobot mobile, MinJun Kim, PhD, a professor in the College of Engineering and director of Drexel’s Biological Actuation, Sensing & Transport (BAST) Lab, is now offering a method for making them agile.
Drexel researchers have developed a method for using electric fields to help microscopic bacteria-powered robots detect obstacles in their environment and navigate around them to get to their destination.
“What’s a ship without a captain? We know electric fields can be used to push the microrobots in any direction, like a boat carried by the ocean’s currents, but in this paper we’re exploring how those same fields can be used to help the robot detect obstacles and navigate around them,” Kim said.
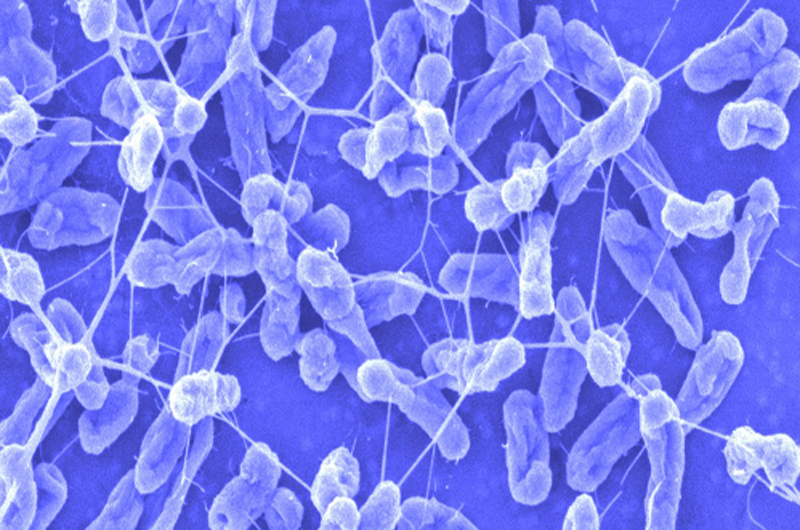
The key to both motion and navigation for the tiny hybrid robots is S. marcescens bacterium. These rod-shaped swimmers, who are known culprits of urinary tract and respiratory infections in hospitals, naturally possess a negative charge, which means they can be manipulated across an electric field as if they were pixels in an etch-a-sketch.
When a slimy smear of the bacteria is applied to a substrate, in this case a square chip of photosensitive material called SU-8, you get a negatively charged microrobot that can move around in a fluid by riding the waves of an electric field. The bacteria’s whip-like flagella help keep the robot suspended in the fluid environment while also providing a small bit of forward propulsion. The real push comes from two perpendicular electric fields that turn the fluid into an electrified grid. Since the bacteria are negatively charged, the team can manipulate the robots simply by adjusting the strength of the current.
“We have shown that we can manually direct the robots or give it a set of coordinates to get it from point A to point B, but our goal in this research is to enable the microrobots to navigate a course with random impediments blocking its way,” Kim said. “This requires a level of automation that has not previously been achieved in hybrid microrobotics research.”
Kim’s group met this goal by making a control algorithm that enables the tiny robots to effectively use the shape of the electric field they’re riding as a way to detect and avoid obstacles — like a surfer reading the waves’ break to steer clear of submerged hazards.
By running a series of tests using charged particles, the team came to understand how the electric field changed when it encountered insulator objects. “The electric field was distorted near the corners of the obstacle,” the authors write. “Particles that passed by the first corner of the obstacles also had affected trajectories even though they had a clear space ahead to pass; this is due to the distorted electric field.”
They used this deformation in the field as input data for their steering algorithm. So when the robot senses a change in the pattern of the field the algorithm automatically adjusts its path of to dodge the obstacle. In this way, the robots are using electric fields both as a mode of transportation and as a means of navigation.
By responding to the way electric fields deform around static obstacles, bacteria-powered microrobots using Drexel's algorithm can detect the obstructions and adjust their course.
In addition to the electric field information, the algorithm also uses image-tracking from a microscope-mounted camera to locate the initial starting point of the robot and its ultimate destination.
“With this level of control and input from the environment we can program the microrobot to make a series of value judgments during its journey that affect its path,” Kim said. “If for instance we want the robot to avoid as many obstacles as possible, regardless of the distance traveled. Or we could set it to take the most direct, shortest route to the destination — even if it’s through the obstacles. This relative autonomy is an important step for microrobots if we’re going to one day put them into a complex system and ask them to perform a task like delivering medication or building a microstructure.”
The next step for Kim’s lab is to develop a system consisting of multiple bacteria-powered microrobots that is able to perform manipulation of multiple live cells in vitro. The ability to control such a system could have many applications, including ideas like being able to manipulate stem cells to direct their growth.